相等踏面意味着楼梯上的所有踏面都是平等的,无论是平级还是拐弯处的梯级。
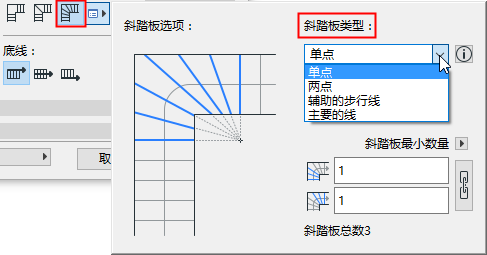
在楼梯设置-几何形状和定位面板:
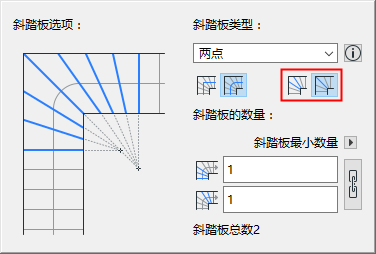
从弹出式对话框中选择踏面相同的斜踏步的四种类型之一:单点、双点、主线,和辅助步行线。
根据可用性,在斜踏步类型中选择中间部分的踢面和踏面:
踏面相同的斜踏步: 在中部构建踢面和踏面
只有单点方法有两个版本,这取决于斜踏步中心是一个踢面还是踏面。
|
单点方法 |
双点方法 |
|
|
|
踢面在中间 |
踏步板在中间 |
|
主线方法 |
辅助步行线方法 |
||
|
踢面在中间 |
踏步板在中间 |
踢面在中间 |
踏步板在中间 |
每种方法都在下面说明:
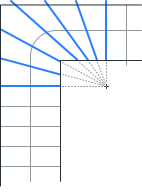
1。平等踏面是沿着步行线进行测量的,从楼梯底部开始。到转动点为止的踢面封闭线可被认为是斜踏步踢面中心。
2。斜踏步的起点和终点线 - 又叫做最后一个和第一个直阶梯 - 已构建,基于斜踏步参数数量。
3。起点和终点线已扩展,其交叉点组成了斜踏步的中心点。
4。相等踏面是沿着与中心点相连接的行走线测量的,这些线组成了拐弯部分的阶梯上的踢面。
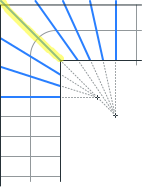
1。斜踏步中心已构建:
–单个踢面可在转弯处的平分线上构建。
2。相等踏面是沿着步行线两侧方向进行测量的,从平分线与步行线相交的点开始。
3。斜踏步的起点和终点线 - 又叫做最后一个和第一个直阶梯 - 已构建,基于斜踏步参数数量。
4。起点和终点线已扩展,其交叉点组成了斜踏步的两个中心点。
5。相等踏面点是沿着与对应的某一个中点相连接的行走线测量的。这些线组成了拐弯部分的阶梯上的踢面。
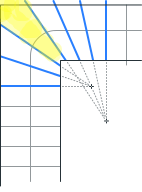
1。斜踏步中心已构建:
–单个踏步板是沿着行走线测量的,与拐弯处平分线对称
–逐渐减小的踏步板最小宽度数值可在与平分线相对称的拐弯处内边上测量。
–内边上的点和行走线上的点定义了中心踏面。
2。相等踏面是沿着步行线测量的,从中心踏面与行走线相交处边上的点开始。
3。斜踏步的起点和终点线 - 又叫做最后一个和第一个直阶梯 - 已构建,基于斜踏步参数数量。
4。起点和终点线已扩展。中心踏面边也已扩展。这些线的交叉点组成了斜踏步的两个中心点。
5。相等踏面点是沿着与对应的某一个中点相连接的行走线测量的。这些线组成了拐弯部分的阶梯上的踢面。
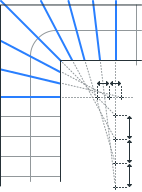
1。斜踏步中心已构建:
–单个踢面可在转弯处的平分线上构建。
–相等踏面是沿着步行线两侧方向进行测量的,从平分线与步行线相交的点开始。
–逐渐减小的踏步板最小宽度数值可在两侧拐弯处内边上测量。
–内边上的点和行走线上的点定义了两个中心踏面。
2。相等踏面是沿着行走线的两个方向测量的,从中心踏板开始。
3。斜踏步的起点和终点线 - 又叫做最后一个和第一个直阶梯 - 已构建,基于斜踏步参数数量。
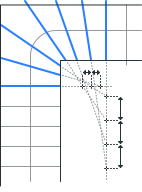
4。起点和终点线(主线)已扩展。两个中心踏面的边也已扩展。
5。第一个中心点踏边和平分线与起点线相交的点可定义为距离X。
6。距离X沿着起点线进行了多次测量。这些点与沿着行走线测量的对应平等踏面互相连接。这些线组成了斜踏步前半部分的踢面。
7。最后一个中心点踏边和平分线与终点线相交的点可定义为距离Y。
8。距离Y沿着终点线进行了多次测量。这些点与沿着行走线测量的对应平等踏面互相连接。这些线组成了斜踏步后半部分的踢面。
1。斜踏步中心已构建:
–单个踏步板是沿着行走线测量的,与拐弯处平分线对称
–逐渐减小的踏步板最小宽度数值可在与平分线相对称的拐弯处内边上测量。
–内边上的点和行走线上的点定义了中心踏面。
2。相等踏面是沿着行走线的两个方向测量的,从中心踏板开始。
3。斜踏步的起点和终点线 - 又叫做最后一个和第一个直阶梯 - 已构建,基于斜踏步参数数量。
4。起点和终点线(主线)已扩展。中心踏面边也已扩展。
5。第一个中心点踏边与起点线相交的点可定义为距离X.
6。距离X沿着起点线进行了多次测量。这些点与沿着行走线测量的对应平等踏面互相连接。这些线组成了斜踏步前半部分的踢面。
7。第一个中心点踏边与终点线相交的点可定义为距离Y。
8。距离Y沿着终点线进行了多次测量。这些点与沿着行走线测量的对应平等踏面互相连接。这些线组成了斜踏步后半部分的踢面。
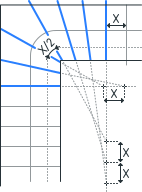
1。斜踏步中心已构建:
–单个踢面可在转弯处的平分线上构建。
–相等踏面是沿着步行线两侧方向进行测量的,从平分线与步行线相交的点开始。
–辅助步行线已构建,方式为从内边开始将行走线偏移200mm。
–2/3的踏步板已沿着辅助行走线的两个方向完成测量。
–行走线上的点和辅助行走线上的点定义了两个中心踏面。
2。相等踏面是沿着行走线的两个方向测量的,从中心踏板开始。
3。斜踏步的起点和终点线 - 又叫做最后一个和第一个直阶梯 - 已构建,基于斜踏步参数数量。
4。起点和终点线(主线)已扩展。两个中心踏面的边也已扩展。
5。踏步板长度是沿着起点线进行了多次测量的,从第一个中心踏边与起点线相交的点开始。
6。这些点与沿着行走线测量的对应平等踏面互相连接。这些线组成了斜踏步前半部分的踢面。
7。踏步板长度是沿着终点线进行了多次测量的,从最后一个中心踏边与终点线相交的点开始。
8。这些点与沿着行走线测量的对应平等踏面互相连接。这些线组成了斜踏步后半部分的踢面。
1。斜踏步中心已构建:
–单个踏步板是沿着行走线测量的,与拐弯处平分线对称
–辅助步行线已构建,方式为从内边开始将行走线偏移200mm。
–1/2的踏步板是沿着辅助行走线测量的,与拐弯处平分线对称。
–行走线上的点和辅助行走线上的点定义了中心踏面。
2。相等踏面是沿着行走线的两个方向测量的,从中心踏板开始。
3。斜踏步的起点和终点线 - 又叫做最后一个和第一个直阶梯 - 已构建,基于斜踏步参数数量。
4。起点和终点线(主线)已扩展。中心踏面边也已扩展。
5。踏步板长度是沿着起点线进行了多次测量的,从第一个中心踏边与起点线相交的点开始。
6。这些点与沿着行走线测量的对应平等踏面互相连接。这些线组成了斜踏步前半部分的踢面。
7。踏步板长度是沿着终点线进行了多次测量的,从最后一个中心踏边与终点线相交的点开始。
8。这些点与沿着行走线测量的对应平等踏面互相连接。这些线组成了斜踏步后半部分的踢面。
斜踏步单元
如果需要斜踏步单元,那么行走线的斜踏步部分的中点就应当被考虑为斜踏步的起点。
•平分线结构应该穿过这个点并垂直于行走线。
•平等踏板是从该点开始测量的。
•逐渐减小的踏步板最小宽度可从词典在内边上的映射开始测量。