Příklad 1: Odsazení trámů k deskám
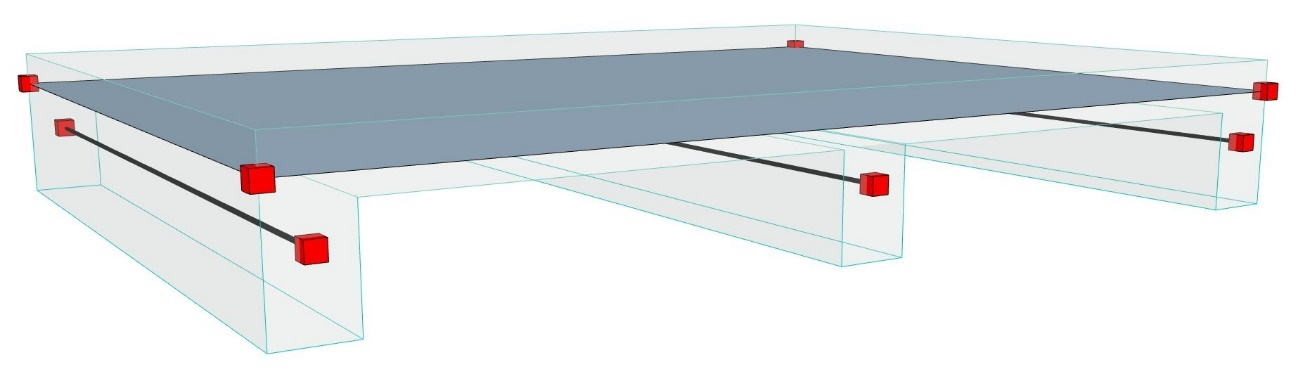
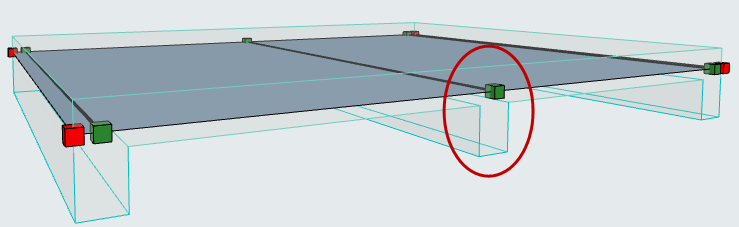
Po přepnutí do modelu pro analýzu konstrukce je vidět, že 1D členy trámů (osy) nejsou napojené na desku: chybí zde propojení, které je nezbytné pro analýzu konstrukce.
Řešením může být pravidlo generování, které odsadí osy trámů k desce.
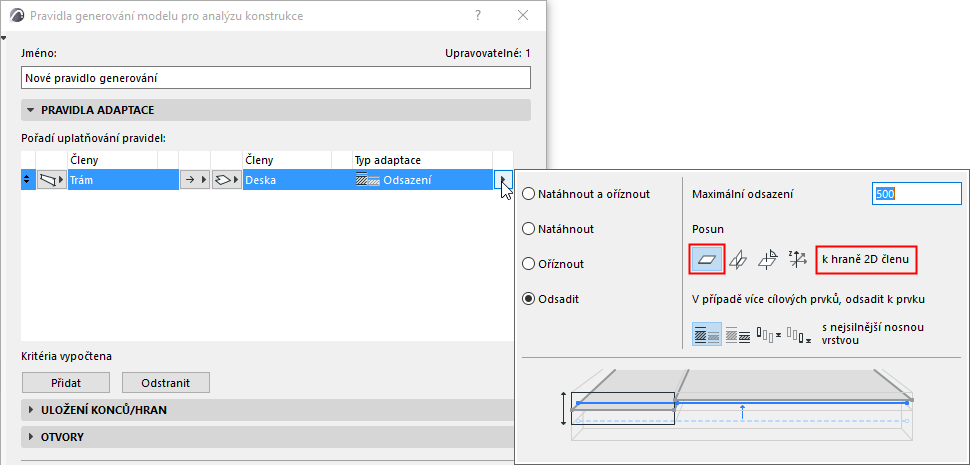
•Členové skupiny 1: Trám
•Členové skupiny 2: Deska
•Metoda: Jeden k druhému (trám bude posunut k desce)
•Typ adaptace: Posun
•Další možnosti včetně maximálního povoleného odsazení.
V tomto případě použijeme globální směr Z.
Poznámka: Nastavené tolerance jsou hodnoty typu délka: budou použity jednotky nastavených pracovních jednotek (Předvolby > Pracovní jednotky).
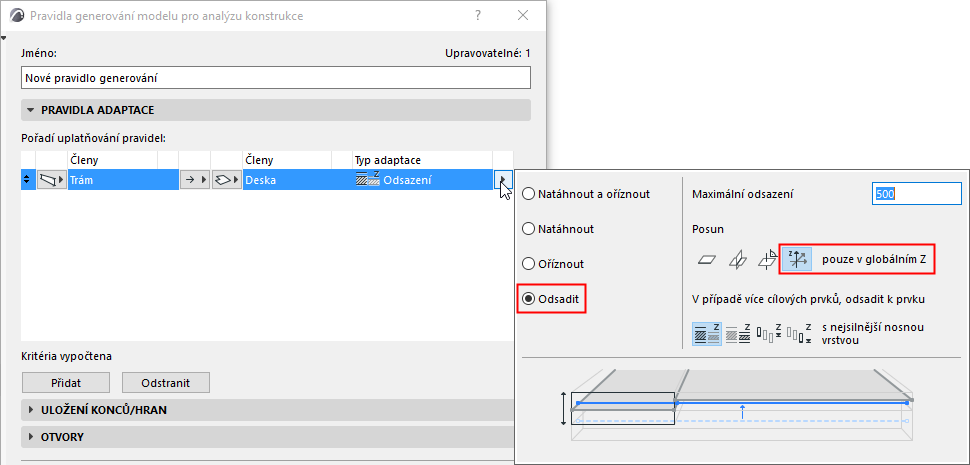
Tlačítkem OK pravidlo potvrdíte. Dle očekávání jsou osy trámů odsazeny do roviny desky (přímo nahoru, ve směru osy Z).
Osa jednoho trámu (prostřední trám) ale zůstala v původní pozici. Vypadá to jako chyba.
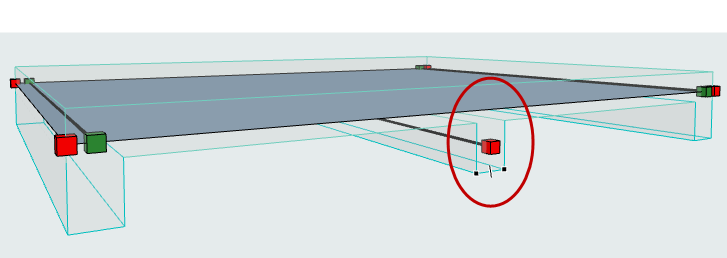
Označíme trám a zkontrolujeme jeho nastavení. Zde je jasně vidět, že trám se neřídil pravidlem odsazení, protože v nastavení tohoto trámu je na panelu Parametry pro analýzu konstrukce vypnuté odsazení.
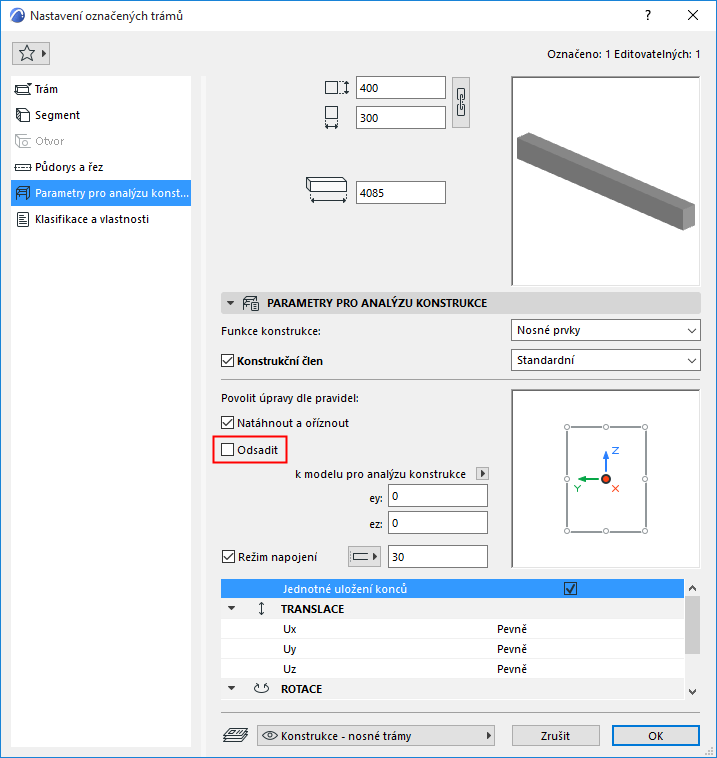
Oprava problému:
•Zapněte volbu Odsadit v nastavení trámu.
•Kliknutím na OK okno zavřete.
Model se automaticky upraví podle nastavených pravidel generování. Osa trámu je posunuta přesně podle pravidla:
Aktuální pravidlo odsadí trámy k desce ve směru Z. Model tedy může být považován za konstrukčně správný.
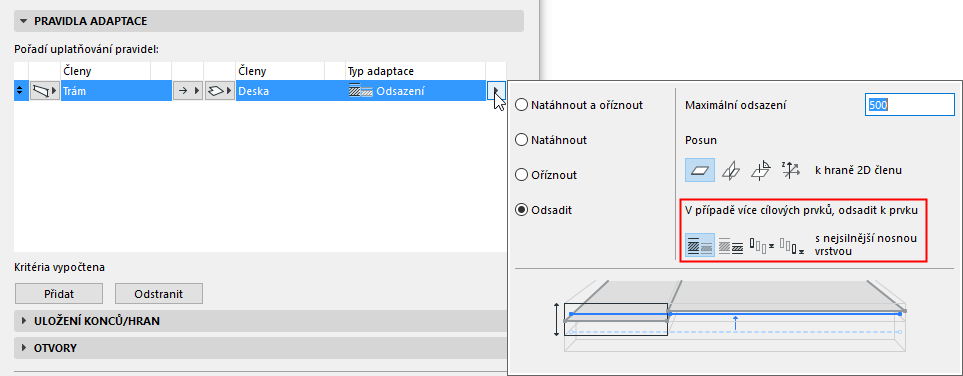
Vyhovovat ale může i jiná metoda: Osy trámů by měly být odsazeny na hrany desky.
Upravte tuto volbu v pravidlech generování:
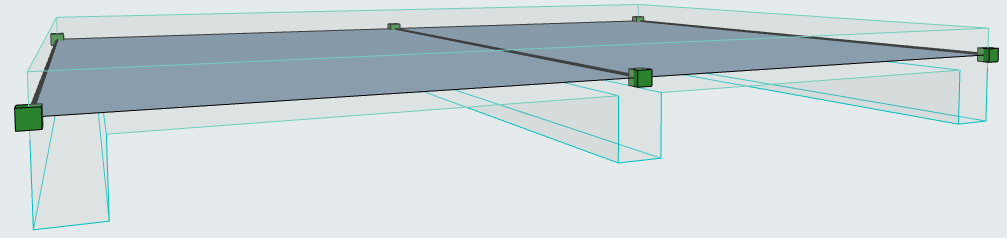
Tlačítkem OK pravidlo potvrdíte.
Jak jsme očekávali, osy hran krajních trámů jsou odsazeny na hranu roviny desky (ne jen přímo nahoru jako v předchozím příkladu, kde bylo použito odsazení v globálním směru Z).
Pokud je možné prvek odsadit k více různým prvkům, je třeba určit, ke kterému to má být.
Náhledový obrázek vám pomůže zorientovat se v dostupných možnostech: